New Nanorobotic Ideas From Adriano Cavalcanti (http://www.nanorobotdesign.com) Adriano Cavalcanti is Chairman and CEO of Center for Automation in Nanobiotech (CAN) -- created in 2004 through the collaboration of private funds. CAN as a private company focuses on investigation of new paradigms for innovation in systems and automation design. CAN main thrust and aim is the development of commercial nanobiotechnology systems and devices that may benefit people around the globe with biomedical engineering advances.
some pictures from NCD simulator Nanotechnology News Network decide to ask some questions about new nanotechnology program - NCD simulator. We also asks some questions about nanorobotics at all. Here (http://www.nanorobotdesign.com/papers/nanorobotTutorial.pdf) you can find nanorobotics tutorial on NCD simulator. Our administration sincerely thanks to Adriano Cavalcanti for this interview. How your team handle the computational efforts required for such 3D simulation? How you plans to increase the complexity in the NCD? We optimize the software Nanorobot Control Design (NCD) performance applying some techniques such as parallel processing, level of details, and sharing the code in object oriented approach. Such techniques permit us to quickly customize new study of cases for different biomedical engineering applications keeping the code organized with high performance. For upcoming works is being implemented a distributed processing tool to increase simulation capabilities. Hereby
a very interesting aspect about the NCD is the fact that many of
analyses and numerical results may help pave the way on design,
control, and manufacturing nanorobots for biomedical applications.
Indeed the NCD is the result and faith of many contributors,
supporters, and collaborators from different universities, institutes,
and private companies -- as you can observe at the site www.nanorobotdesign.com.
Worthwhile to say, Robert A. Freitas Jr. has been our first and most
important supporter through all his continuous contributions, even when
the idea about developing simulations for Nanorobot Control Design
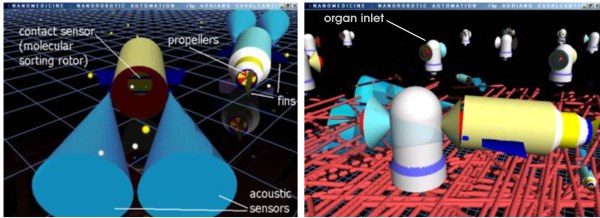
(NCD) was just beginning. The nanorobots could be used for a large range of applications, also for manipulating and repairing cells. Basically, we may observe two distinct kind of nanorobot utilization. One is nanorobots for the surgery intervention, and the other is nanorobot to monitor patients’ body. For the first case, a most suitable approach is the tele-operation of nanorobots as valuable tools for biomedical engineering problems. Hence, for example surgery experts guiding a minimally invasive medical procedure. Such applications are expected also to be extremely useful for brain surgeries. For cases such as monitoring the human body, the nanorobots are expected to follow a defined set of specified activation rules for triggers of designed behaviors. In such case the nanorobot is designed to be able to interact with the 3D human body environment, in order to fulfil programmed tasks. The nanorobots
require specific controls, sensors and actuators, basically in
accordance with each kind of biomedical application. Many of such
required nanodevices are being built nowadays in different research
centers around the globe, as well as the necessary control
specifications. Actually we
are also investigating new designs on nanorobotics motion strategies.
Flagella motor is been investigated in our new analyses, and this new
work will be soon disclosed at the nanorobot design site. When you talk
about nanorobots operating in the human body, there are some aspects on
design to be addressed in order to enable their successful application.
A set of important factors are: real time feed-back control, computing,
communication, and locomotion strategy -- nanorobots cannot be operated
efficiently without it. The design, control, and manufacturing of nanorobots is a challenging and very new field. The use of simulation as a practical tool to evaluate and validated nanorobots approaches enabling biomedical solutions is quite useful. Our simulation includes the main physical properties existent in the environment where the nanorobots are projected to operate. Moreover, the NCD has a modular object
oriented architecture. Hence for each study case done, it acquires some
additional improvement, in accordance with details on micro and nano
scale physics. Therefore aspects such as Brownian motion, viscosity,
fluid mechanics, among others, are comprised in the NCD software. In our first works the obstacles were generated stochastically, then taking random positions throughout the 3D workspace. The first environment versions had the obstacles positioned statically. For the recent and most actual nanorobot investigations, we have included moving obstacles in the environment. The complexity and details comprised in the NCD has been increasing after each investigation. We have conducting the necessary investigations considering all the environment aspects to successfully achieve the aim on nanorobot control levels for navigation and positioning within the human body. Applying
a simulator help us for a better insight on many reactions not
previously observed in depth for a 3D workspace, considering nanorobots
collective work coordination, energy consumption, and control
automation. The NCD can be a big plus for robots experts and control
engineers regarding good choices on the better way to apply and operate
nanorobots. Through the use of nanotechnology techniques, genetics advances, and biomolecular computing, we can expect to see biological nanorobots being applied for specific biomedical and environmental issues. We may have workable biological nanorobots in a very short time. Some
examples on microbiology engineering dealing with approaches to achieve
such goals have been proposed and works on building in vivo digital
circuits have been demonstrated as well (www.swiss.csail.mit.edu/~rweiss).
Moreover, a proposal on nanorobots being injected inside living cells
and controlling them for biomedical purposes was done alike (www.nanomedicine.com/NMI/9.4.7.htm).
More complex nanorobots will be manufactured through the use of
diamondoid or other similarly rigid materials awaiting mainly our
ability to do positional mechanosynthesis (www.foresight.org/stage2/mechsynthbib.html). The most important synergetic gears comprising any research field could be said as: creative minds and financial resources to the necessary support on facilities for any fast development. We can observe more than ever, that today the growth in investment and interest on nanotechnology is living a great scenery. The trends show that the advances in nanobiotechnology breakthroughs are being achieved in a formidable speed. Not only governments but also private companies are putting their own thrust on nanobiotech fast development as the bridge for a new time in the human history. Altogether, make quite reasonable to say as real to expect the first biological nanorobots being fully functional in five years or less. Advances on diamondoid manufacturing has also been done most recently. We may be able to use it on manufacturing nanodevices and building nanorobots in the coming ten years. Hence, in terms of time we are really talking about a very near better future. 2004, Nanotechnology News Network |
 Adriano Cavalcanti |

| Print this | Send this | |